โดย สมชาย เบียนสูงเนิน
เราสามารถสร้างตัวอักษรหรือรูปแบบเก็บไว้ในโมดูลของ LCD ได้ 8 รูปแบบ
โดยส่งเก็บไว้ที่หน่วยความจำ CGRAM เรียกแสดงผลผ่าน Address ของ
DDRAM ที่ 0x00 ถึง 0x07 การบันทึกรูปแบบลงใน CGRAM จะต้องเริ่มจากการสร้างรหัสของรูปแบบ โดยที่ 1 รูปแบบ
จะต้องใช้ตัวแปรในการเก็บรหัสในแต่ละแถวจำนวน 8 ตัวแปร
ส่วนใหญ่ต้องกำหนดเป็นแบบอะเรย์
หากต้องการสร้างตัว ส ก็จะต้องกำหนดค่าของตัวแปรเป็น char pattern1[8]
={0x01,0x01,0x1F,0x01,0x1F,0x11,0x19,0x00}
ข้อมูลตัวสุดท้าย 0x00 เป็นแถวของการแสดง
Cursor ไม่สามารถสร้างรูปแบบที่แถวนี้ได้จึงกำหนดค่าเป็น 0x00 โดยการกำหนดค่ารูปแบบขึ้นอยู่กับจำนวน Dot ของ LCD
ด้วย ในรูปที่ 1 เป็นขนาด 5x7 dot

รูปที่ 1 รหัสสำหรับสร้างรูปแบบเป็นตัว ส
เมื่อได้รหัสของรูปแบบที่สร้างแล้ว
แล้วขั้นต่อไปก็จะทำการบันทึกรหัสไปยังหน่วยความจำของ CGRAM โดยต้องส่งคำสั่งเพื่อระบุตำแหน่งที่จะจัดเก็บรหัสของ
CGRAM ว่าต้องการเก็บที่ตำแหน่งใด โดยมีให้เลือก 8 ตำแหน่ง
โดยรหัสคำสั่งรวมกับรหัสตำแหน่งของ CGRAM ขนาด 8 bit แสดงได้ดังนี้
- รูปแบบที่ 1 ( แสดงผลเมื่อส่งรหัส 0x00 ไปที่ DDRAM) กำหนดตำแหน่งเริ่มของ CGRAM ที่ 0x40
- รูปแบบที่ 2 ( แสดงผลเมื่อส่งรหัส 0x01 ไปที่ DDRAM) กำหนดตำแหน่งเริ่มของ CGRAM ที่ 0x48
- รูปแบบที่ 3 ( แสดงผลเมื่อส่งรหัส 0x02 ไปที่ DDRAM) กำหนดตำแหน่งเริ่มของ CGRAM ที่ 0x50
- รูปแบบที่ 4 ( แสดงผลเมื่อส่งรหัส 0x03 ไปที่ DDRAM) กำหนดตำแหน่งเริ่มของ CGRAM ที่ 0x58
- รูปแบบที่ 5 ( แสดงผลเมื่อส่งรหัส 0x04 ไปที่ DDRAM) กำหนดตำแหน่งเริ่มของ CGRAM ที่ 0x60
- รูปแบบที่ 6 ( แสดงผลเมื่อส่งรหัส 0x05 ไปที่ DDRAM) กำหนดตำแหน่งเริ่มของ CGRAM ที่ 0x68
- รูปแบบที่ 7 ( แสดงผลเมื่อส่งรหัส 0x06 ไปที่ DDRAM) กำหนดตำแหน่งเริ่มของ CGRAM ที่ 0x70
- รูปแบบที่ 8 ( แสดงผลเมื่อส่งรหัส 0x07 ไปที่ DDRAM) กำหนดตำแหน่งเริ่มของ CGRAM ที่ 0x78
ถ้าต้องการให้
ส แสดงเมื่อส่งรหัส 0x02 ก็ต้อง ส่งรหัสคำสั่ง 0x50 ไปให้หน่วยประมวลผลของ
LCD ทราบ จากนั้นก็ส่งรหัสข้อมูลของตัว ส ทั้ง 8
แถวตามไป แสดงการเขียนคำสั่ง โดยอ้างอิงชื่อฟังก์ชันที่ใช้ในการส่งแสดงผลที่ LCD
ในตัวอย่างโปรแกรมที่ 1
char patternSO[8]={0x01,0x01,0x1F,0x01,0x1F,0x11,0x19,0x00};// ส
LCD_RS=0; //
ส่งสัญญาณว่าเป็นคำสั่ง
lcd_sendbyte(0x50); // ส่งคำสั่งเพื่อระบุตำแหน่งที่จะจัดเก็บรหัสของ
CGRAM รหัส 0x50 แสดงผลเมื่อส่งรหัส
0x02
LCD_RS=1;
; // ส่งสัญญาณว่าเป็นข้อมูล
lcd_sendbyte(patternSO[0]); // ส่งข้อมูลที่เป็นรหัสรูปแบบแถวที่
1
lcd_sendbyte(patternSO[1]); // ส่งข้อมูลที่เป็นรหัสรูปแบบแถวที่
2
lcd_sendbyte(patternSO[2]); // ส่งข้อมูลที่เป็นรหัสรูปแบบแถวที่
3
lcd_sendbyte(patternSO[3]); // ส่งข้อมูลที่เป็นรหัสรูปแบบแถวที่
4
lcd_sendbyte(patternSO[4]); // ส่งข้อมูลที่เป็นรหัสรูปแบบแถวที่
5
lcd_sendbyte(patternSO[5]); // ส่งข้อมูลที่เป็นรหัสรูปแบบแถวที่
6
lcd_sendbyte(patternSO[6]); // ส่งข้อมูลที่เป็นรหัสรูปแบบแถวที่
7
lcd_sendbyte(patternSO[7]); // ส่งข้อมูลที่เป็นรหัสรูปแบบแถวที่
8
หรืออาจใช้ for() ช่วย ในการส่งข้อมูลทั้ง 8 แถว
เพราะประกาศตัวแปรแบบอะเรย์อยู่แล้ว แสดงได้ดังนี้
for(i=0;i<8;i++)
{ lcd_sendbyte(patternSO [i]); // ส่งข้อมูลที่เป็นรหัสรูปแบบตัวที่ i
}
สุดท้ายการเรียกให้แสดงผลก็ส่งรหัสที่เป็นตัวแทนของรูปแบบไปที่
LCD เช่นเดียวกับอักษรอื่นๆที่ถูกบันทึกใน CGROM
เช่น ต้องการให้แสดงอักษร Z ก็ต้องส่งรหัส 0x5C
ดังนั้นรหัสที่เป็นตัวแทนรูปแบบตัวอักษร ส ก็คือ 0x02 นั้นเอง เช่น lcd_sendbyte(0x02)
ตัวอย่างโปรแกรม ใช้ไมโครคอนโทรลเลอร์ PIC16F887
โจทย์ ต่อวงจรและเขียนโปรแกรมเพื่อให้ LCD ขนาด 16x2 แสดงข้อความ “ไฟฟ้า 2555” ที่บรรทัดแรก เริ่มตำแหน่งที่ 2
และ ข้อความ “Electrical 2012” บรรทัดสอง
เริ่มตำแหน่งที่ 1
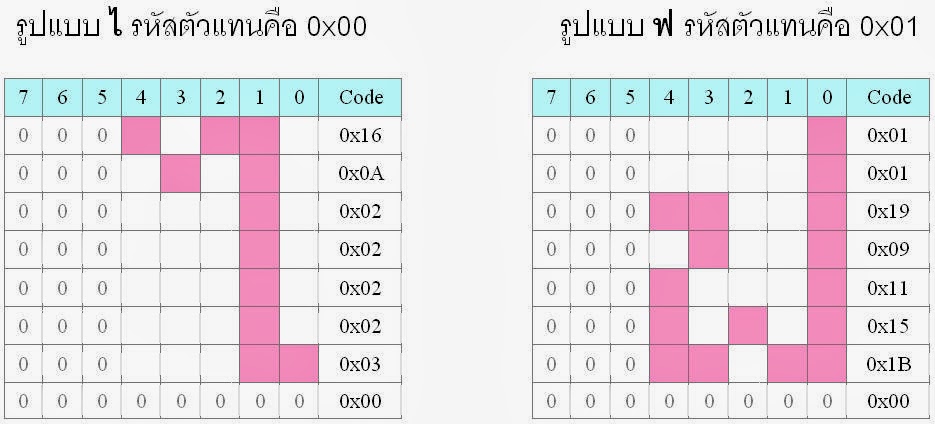
ตัวอักษรที่ไม่มีในหน่วยความจำของ LCD คือคำว่า ไฟฟ้า
ดังนั้นจะต้องสร้างตัวอักษรเอง 4 รูปแบบ โดยจะเก็บที่ในตำแหน่ง 0x00 ถึง 0x03


รูปที่ 2 การแสดงผลของรูปแบบที่สร้างขึ้นในหน่วยความจำของ LCD
โปรแกรม แสดงรูปแบบที่สร้างขึ้น
#include
<pic.h> // Include header file
for MCU
#include
"LCD16F887.h" // Include Library for
LCD display
#define
_XTAL_FREQ 20000000 // Define
Frequency 20.0 MHz for __delay_ms
__CONFIG(FOSC_HS
& WDTE_OFF & LVP_OFF);
//----------------------------------------------------------Main
Program---------------------------------------------------//
void
main(void)
char PattPho[8]={0x01,0x01,0x19,0x09,0x11,0x15,0x1B,0x00}; // ฟ
char PattPho2[8]={0x0A,0x05,0x11,0x09,0x11,0x15,0x1B,0x00}; // ฟ้
char PattR[8] ={0x00,0x00,0x06,0x09,0x01,0x01,0x01,0x00}; //
า
int i;
lcd_init(); //Call
initial Function of LCD library
LCD_RS=0; lcd_sendbyte(0x40); // Send Conmand Set Pattern Start at 0x00
LCD_RS=1; // Send Data of
Pattern
for(i=0;i<8;i++)
{ lcd_sendbyte(PattI[i]); // ไ
}
// ในกรณีที่บันทึกข้อมูลในตำแหน่งที่ต่อเนื่องกันไม่จำเป็นต้องส่งคำสั่งระบุตำแหน่งใหม่
// เพราะตำแหน่งในหน่วยความจำของ
LCD จะเลื่อนให้ครั้งละ 1 ตำแหน่ง แบบอัตโนมัติ
// แต่จำเป็นต้องส่งข้อมูลให้ครบ 8 ครั้ง สำหรับ
1 รูปแบบ
for(i=0;i<8;i++)
{ lcd_sendbyte(PattPho[i]); //
ฟ
}
for(i=0;i<8;i++)
{ lcd_sendbyte(PattPho2[i]);
//
ฟ้
}
for(i=0;i<8;i++)
{ lcd_sendbyte(PattR [i]); //
า
}
LCD_RS=0; lcd_sendbyte(0x81); // Send Conmand Line 1 Location 2
LCD_RS=1;
//
Send Data
lcd_sendbyte(0x00); // ไ
// ในกรณีที่แสดงผลในตำแหน่งที่ต่อเนื่องกันไม่จำเป็นต้องส่งคำสั่งระบุตำแหน่งใหม่
// เพราะตำแหน่งในหน่วยความจำของ LCD จะเลื่อนให้ครั้งละ
1 ตำแหน่ง แบบอัตโนมัติ
lcd_sendbyte(0x01); // ฟ
lcd_sendbyte(0x02); // ฟ้
lcd_sendbyte(0x03); // า
lcd_puts (0x85, " 2555"); //Send text 2555
start address 0x85 (6nd address of Line 1)
lcd_puts (0xC0, "Electrical 2012");
//Send text Electrical
2012 start address 0xC0 of Line 2
while(1);
}







